PHYS250H: Power Supply Project II
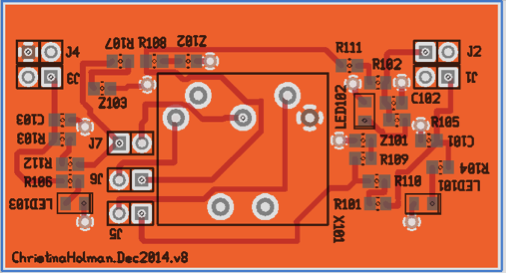
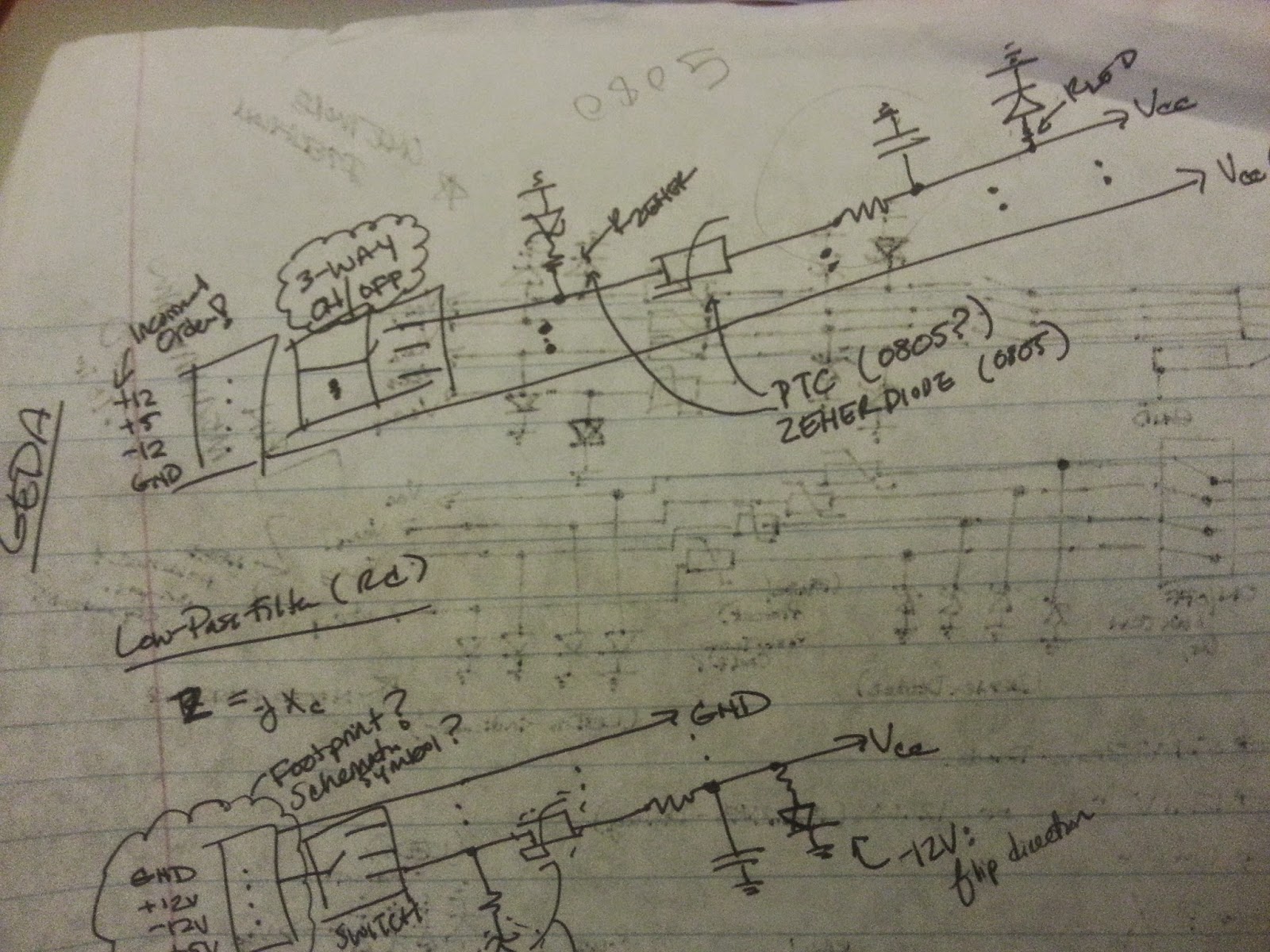
The printed circuit board design is a projection of the schematic design. The placement of the footprints for the set of jumpers was positioned intentionally to allow for the power lines to be connected simultaneously as well as for easy access when soldering. We went through several iterations in design due to mishaps in communication -- a key issue in engineering firms. It took me a little while to understand just exactly how Battat envisioned this project and the best way to design such. At first, different components were in place than in the final design: I moved from three-way jumpers that resembled the slapstick original design for the Electronics Lab (without direct input into the rails); to long rectangular flow mirroring the circuit schematic; and to a dual-pin jumper and stacked 805 footprints. Finally, I ended with a reasonable and compact design for the PCB power supply. OSH Park, a community printed circuit board order, charges $5 per square inch of a dual-layer bo